Hãy theo dõi chúng tôi trên mạng xã hội để nhận bài đăng nhanh chóng!
Con quay hồi chuyển laser vòng (RLG) đã có những bước tiến đáng kể kể từ khi ra đời, đóng vai trò then chốt trong các hệ thống định vị và vận tải hiện đại. Bài viết này đi sâu vào sự phát triển, nguyên lý và ứng dụng của RLG, nhấn mạnh tầm quan trọng của chúng trong các hệ thống định vị quán tính và việc sử dụng chúng trong các phương tiện vận tải khác nhau.
Hành trình lịch sử của con quay hồi chuyển
Từ ý tưởng đến hệ thống định vị hiện đại
Hành trình của con quay hồi chuyển bắt đầu với sự đồng phát minh la bàn hồi chuyển đầu tiên vào năm 1908 bởi Elmer Sperry, người được mệnh danh là "cha đẻ của công nghệ định vị hiện đại", và Herman Anschütz-Kaempfe. Qua nhiều năm, con quay hồi chuyển đã được cải tiến đáng kể, nâng cao tính hữu dụng trong định vị và vận tải. Những tiến bộ này đã cho phép con quay hồi chuyển cung cấp hướng dẫn quan trọng để ổn định các chuyến bay và cho phép vận hành tự động. Một cuộc trình diễn đáng chú ý của Lawrence Sperry vào tháng 6 năm 1914 đã cho thấy tiềm năng của hệ thống lái tự động bằng con quay hồi chuyển bằng cách ổn định máy bay trong khi ông đứng trong buồng lái, đánh dấu một bước tiến đáng kể trong công nghệ lái tự động.
Chuyển sang sử dụng con quay hồi chuyển laser dạng vòng
Quá trình phát triển tiếp tục với phát minh con quay hồi chuyển laser vòng đầu tiên vào năm 1963 bởi Macek và Davis. Sự đổi mới này đánh dấu sự chuyển dịch từ con quay hồi chuyển cơ học sang con quay hồi chuyển laser, mang lại độ chính xác cao hơn, chi phí bảo trì thấp hơn và giá thành giảm. Ngày nay, con quay hồi chuyển laser vòng, đặc biệt trong các ứng dụng quân sự, chiếm lĩnh thị trường nhờ độ tin cậy và hiệu quả trong môi trường tín hiệu GPS bị nhiễu.
Nguyên lý hoạt động của con quay hồi chuyển laser dạng vòng
Hiểu về hiệu ứng Sagnac
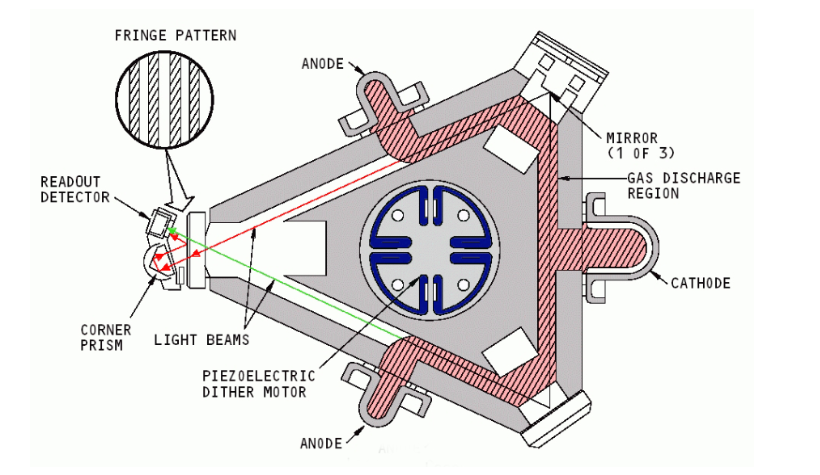
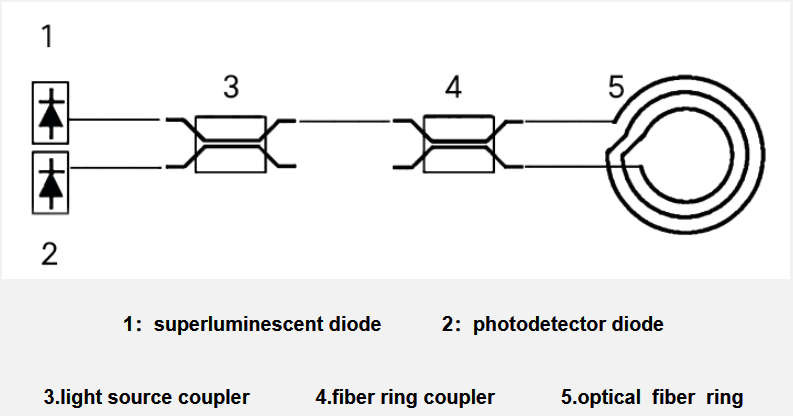
Chức năng cốt lõi của RLG nằm ở khả năng xác định hướng của một vật thể trong không gian quán tính. Điều này đạt được thông qua hiệu ứng Sagnac, trong đó một giao thoa kế vòng sử dụng các chùm tia laser di chuyển theo hướng ngược nhau xung quanh một đường dẫn khép kín. Mẫu giao thoa được tạo ra bởi các chùm tia này hoạt động như một điểm tham chiếu cố định. Bất kỳ chuyển động nào cũng làm thay đổi độ dài đường đi của các chùm tia này, gây ra sự thay đổi trong mẫu giao thoa tỷ lệ thuận với vận tốc góc. Phương pháp khéo léo này cho phép RLG đo hướng với độ chính xác vượt trội mà không cần dựa vào các tham chiếu bên ngoài.
Ứng dụng trong định vị và vận tải
Cách mạng hóa hệ thống định vị quán tính (INS)
Các hệ thống dẫn đường bằng laser (RLG) đóng vai trò quan trọng trong việc phát triển Hệ thống Dẫn đường Quán tính (INS), vốn rất cần thiết để dẫn đường cho tàu thuyền, máy bay và tên lửa trong môi trường không có tín hiệu GPS. Thiết kế nhỏ gọn và không ma sát của chúng khiến chúng trở nên lý tưởng cho các ứng dụng này, góp phần tạo ra các giải pháp dẫn đường đáng tin cậy và chính xác hơn.
Nền tảng ổn định so với INS cố định
Công nghệ INS đã phát triển để bao gồm cả hệ thống nền tảng ổn định và hệ thống cố định bằng dây đai. Hệ thống INS nền tảng ổn định, mặc dù có độ phức tạp về cơ khí và dễ bị hao mòn, nhưng lại mang đến hiệu suất mạnh mẽ thông qua việc tích hợp dữ liệu tương tự. Trên...Mặt khác, các hệ thống INS gắn cố định có lợi thế về tính nhỏ gọn và không cần bảo trì của càng đáp điều khiển bằng laser (RLG), khiến chúng trở thành lựa chọn ưu tiên cho các máy bay hiện đại nhờ tính hiệu quả về chi phí và độ chính xác.
Nâng cao khả năng điều hướng tên lửa
Các hệ thống dẫn đường bằng laser (RLG) cũng đóng vai trò quan trọng trong hệ thống dẫn đường của các loại đạn dược thông minh. Trong môi trường mà GPS không đáng tin cậy, RLG cung cấp một giải pháp thay thế đáng tin cậy cho việc định vị. Kích thước nhỏ và khả năng chịu được các lực cực mạnh khiến chúng phù hợp với tên lửa và đạn pháo, điển hình là các hệ thống như tên lửa hành trình Tomahawk và M982 Excalibur.

Sơ đồ ví dụ về bệ ổn định quán tính có khớp nối gimbal sử dụng giá đỡ. Ảnh do Engineering 360 cung cấp.
Tuyên bố miễn trừ trách nhiệm:
- Chúng tôi xin tuyên bố rằng một số hình ảnh hiển thị trên trang web của chúng tôi được thu thập từ Internet và Wikipedia, với mục đích thúc đẩy giáo dục và chia sẻ thông tin. Chúng tôi tôn trọng quyền sở hữu trí tuệ của tất cả các tác giả. Việc sử dụng những hình ảnh này không nhằm mục đích lợi nhuận thương mại.
- Nếu bạn cho rằng bất kỳ nội dung nào được sử dụng vi phạm bản quyền của bạn, vui lòng liên hệ với chúng tôi. Chúng tôi sẵn sàng thực hiện các biện pháp thích hợp, bao gồm xóa hình ảnh hoặc cung cấp thông tin ghi nguồn chính xác, để đảm bảo tuân thủ luật và quy định về sở hữu trí tuệ. Mục tiêu của chúng tôi là duy trì một nền tảng giàu nội dung, công bằng và tôn trọng quyền sở hữu trí tuệ của người khác.
- Vui lòng liên hệ với chúng tôi qua địa chỉ email sau:sales@lumispot.cnChúng tôi cam kết sẽ hành động ngay lập tức khi nhận được bất kỳ thông báo nào và đảm bảo hợp tác 100% trong việc giải quyết mọi vấn đề như vậy.
Thời gian đăng bài: 01/04/2024