Hãy theo dõi chúng tôi trên mạng xã hội để nhận bài đăng nhanh chóng!
Trong kỷ nguyên của những bước tiến công nghệ đột phá, hệ thống định vị nổi lên như những trụ cột nền tảng, thúc đẩy nhiều tiến bộ, đặc biệt là trong các lĩnh vực đòi hỏi độ chính xác cao. Hành trình từ hệ thống định vị thiên văn sơ khai đến Hệ thống Định vị Quán tính (INS) tinh vi thể hiện nỗ lực không ngừng của nhân loại trong việc khám phá và đạt độ chính xác tuyệt đối. Bài phân tích này đi sâu vào cơ chế phức tạp của INS, khám phá công nghệ tiên tiến của Con quay hồi chuyển sợi quang (FOG) và vai trò then chốt của sự phân cực trong việc duy trì các vòng sợi quang.
Phần 1: Giải mã Hệ thống Định vị Quán tính (INS):
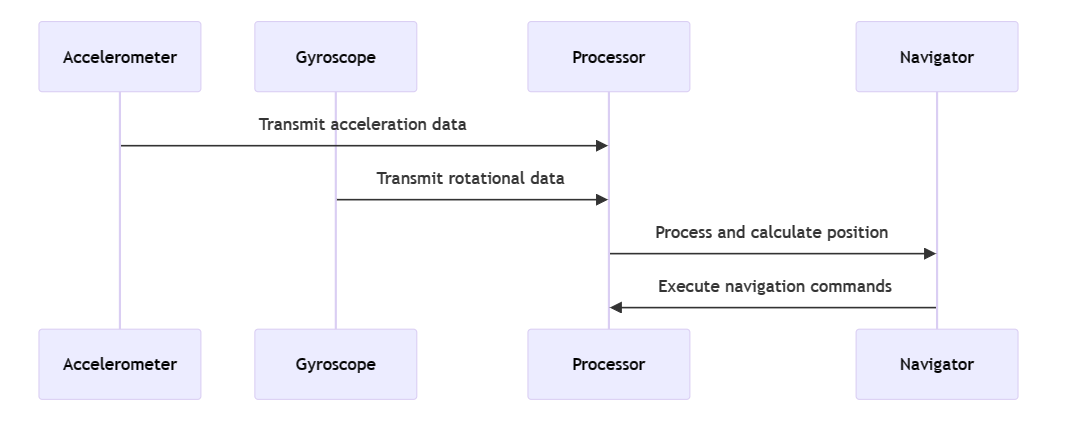
Hệ thống định vị quán tính (INS) nổi bật như một công cụ hỗ trợ định vị tự động, tính toán chính xác vị trí, hướng và vận tốc của phương tiện, độc lập với các tín hiệu bên ngoài. Các hệ thống này kết hợp hài hòa các cảm biến chuyển động và quay, tích hợp liền mạch với các mô hình tính toán cho vận tốc, vị trí và hướng ban đầu.
Một hệ thống INS điển hình bao gồm ba thành phần chính:
• Gia tốc kế: Các thành phần quan trọng này ghi nhận gia tốc tuyến tính của xe, chuyển đổi chuyển động thành dữ liệu có thể đo được.
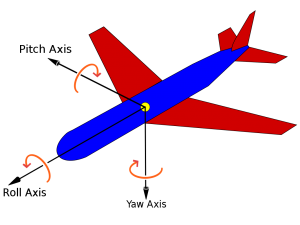
• Con quay hồi chuyển: Là thành phần không thể thiếu để xác định vận tốc góc, chúng đóng vai trò then chốt trong việc định hướng hệ thống.
• Mô-đun máy tính: Trung tâm điều khiển của hệ thống INS, xử lý dữ liệu đa dạng để cung cấp phân tích vị trí theo thời gian thực.
Khả năng miễn nhiễm với các nhiễu loạn bên ngoài của INS khiến nó trở nên không thể thiếu trong lĩnh vực quốc phòng. Tuy nhiên, nó phải đối mặt với hiện tượng "trôi lệch" - sự suy giảm độ chính xác dần dần, đòi hỏi các giải pháp phức tạp như kết hợp cảm biến để giảm thiểu lỗi (Chatfield, 1997).
Phần 2. Động lực học hoạt động của con quay hồi chuyển sợi quang:
Con quay hồi chuyển sợi quang (FOG) báo hiệu một kỷ nguyên chuyển đổi trong cảm biến quay, tận dụng sự giao thoa của ánh sáng. Với độ chính xác là cốt lõi, FOG đóng vai trò thiết yếu trong việc ổn định và điều hướng các phương tiện hàng không vũ trụ.
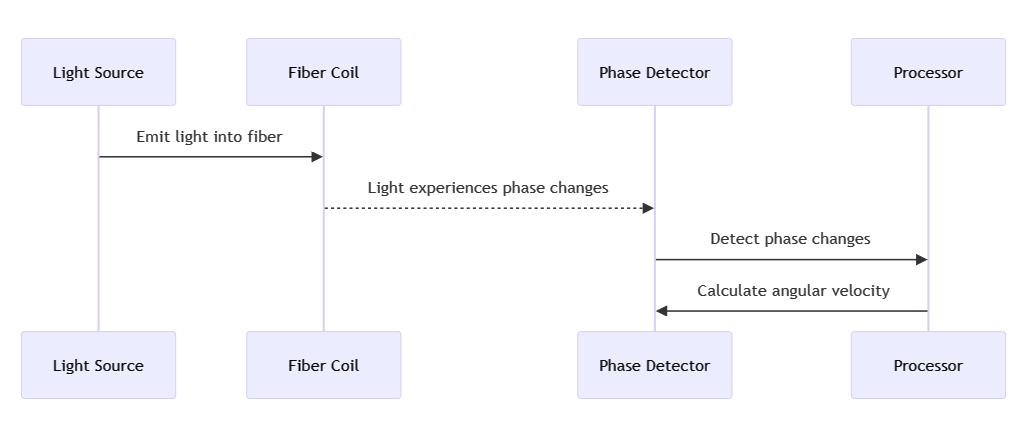
Các cảm biến FOG hoạt động dựa trên hiệu ứng Sagnac, trong đó ánh sáng truyền theo hướng ngược nhau bên trong một cuộn sợi quang quay, tạo ra sự dịch chuyển pha tương quan với sự thay đổi tốc độ quay. Cơ chế tinh tế này chuyển đổi thành các chỉ số vận tốc góc chính xác.
Các thành phần thiết yếu bao gồm:
• Nguồn sáng: Điểm khởi đầu, thường là tia laser, khởi xướng hành trình của ánh sáng kết hợp.
· Cuộn sợiỐng dẫn quang dạng xoắn giúp kéo dài quỹ đạo của ánh sáng, từ đó khuếch đại hiệu ứng Sagnac.
• Bộ tách sóng quang: Bộ phận này phân biệt các mẫu giao thoa phức tạp của ánh sáng.
Phần 3: Ý nghĩa của các vòng sợi quang duy trì phân cực:
Các vòng sợi quang duy trì phân cực (PM), yếu tố thiết yếu cho FOG, đảm bảo trạng thái phân cực ánh sáng đồng nhất, một yếu tố quan trọng quyết định độ chính xác của mẫu giao thoa. Những sợi quang chuyên dụng này, chống lại sự tán xạ chế độ phân cực, tăng cường độ nhạy của FOG và tính xác thực dữ liệu (Kersey, 1996).
Việc lựa chọn các loại sợi PM, dựa trên các yêu cầu vận hành, đặc tính vật lý và sự hài hòa hệ thống, ảnh hưởng đến các chỉ số hiệu suất tổng thể.
Phần 4: Ứng dụng và bằng chứng thực nghiệm:
FOG và INS được ứng dụng rộng rãi trong nhiều lĩnh vực, từ việc điều phối các chuyến bay không người lái đến việc đảm bảo tính ổn định hình ảnh trong điều kiện môi trường khó lường. Minh chứng cho độ tin cậy của chúng là việc sử dụng trong các tàu thám hiểm sao Hỏa của NASA, giúp đảm bảo khả năng điều hướng ngoài Trái đất an toàn (Maimone, Cheng, và Matthies, 2007).
Các xu hướng thị trường dự đoán một phân khúc thị trường ngách đang phát triển mạnh mẽ cho các công nghệ này, với các hướng nghiên cứu nhằm củng cố khả năng phục hồi hệ thống, ma trận độ chính xác và phạm vi thích ứng (MarketsandMarkets, 2020).

Con quay hồi chuyển laser vòng
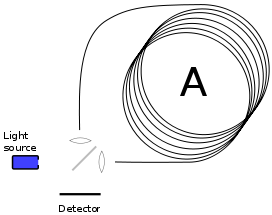
Sơ đồ con quay hồi chuyển quang học dựa trên hiệu ứng Sagnac.
Tài liệu tham khảo:
- Chatfield, Alberta, 1997.Nguyên lý cơ bản của hệ thống định vị quán tính độ chính xác cao.Tiến bộ trong Hàng không và Vũ trụ, Tập 174. Reston, VA: Viện Hàng không và Vũ trụ Hoa Kỳ.
- Kersey, AD, et al., 1996. "Con quay hồi chuyển sợi quang: 20 năm phát triển công nghệ," trongBiên bản hội nghị của IEEE,84(12), tr. 1830-1834.
- Maimone, MW, Cheng, Y., và Matthies, L., 2007. "Đo lường quãng đường bằng hình ảnh trên các robot thám hiểm sao Hỏa - Một công cụ để đảm bảo khả năng lái chính xác và chụp ảnh khoa học,"Tạp chí Robot và Tự động hóa IEEE,14(2), trang 54-62.
- MarketsandMarkets, 2020. "Thị trường hệ thống định vị quán tính theo cấp độ, công nghệ, ứng dụng, linh kiện và khu vực - Dự báo toàn cầu đến năm 2025."
Tuyên bố miễn trừ trách nhiệm:
- Chúng tôi xin tuyên bố rằng một số hình ảnh hiển thị trên trang web của chúng tôi được thu thập từ internet và Wikipedia nhằm mục đích giáo dục và chia sẻ thông tin. Chúng tôi tôn trọng quyền sở hữu trí tuệ của tất cả các tác giả gốc. Những hình ảnh này được sử dụng mà không có ý định thu lợi nhuận thương mại.
- Nếu bạn cho rằng bất kỳ nội dung nào được sử dụng vi phạm bản quyền của bạn, vui lòng liên hệ với chúng tôi. Chúng tôi sẵn sàng thực hiện các biện pháp thích hợp, bao gồm xóa hình ảnh hoặc ghi nguồn đầy đủ, để đảm bảo tuân thủ luật và quy định về sở hữu trí tuệ. Mục tiêu của chúng tôi là duy trì một nền tảng giàu nội dung, công bằng và tôn trọng quyền sở hữu trí tuệ của người khác.
- Vui lòng liên hệ với chúng tôi qua phương thức liên lạc sau:email: sales@lumispot.cnChúng tôi cam kết sẽ hành động ngay lập tức khi nhận được bất kỳ thông báo nào và đảm bảo hợp tác 100% trong việc giải quyết mọi vấn đề như vậy.
Thời gian đăng bài: 18 tháng 10 năm 2023